Практическое руководство по настройке параметров ПИД-регулятора для контроллера АГАВА 6432.10
Введение
В контроллере "АГАВА 6432" программно реализована следующая формула плавного регулирования:
 (1)
(1)
где
n - номер такта регулирования
ΔTn - длительность выходного импульса на n-такте
ΔT - интервал дискретности (период регулирования)
Kp - коэффициент пропорциональности
Ti - постоянная времени интегрирования
Td - постоянная времени дифференцирования
Tmeo - время хода исполнительного механизма
En - ошибка на n-такте
Сигнал широтно-импульсной модуляции (ШИМ), вырабатываемый ПИД-регулятором, определяется тремя компонентами:
Kp*Tmeo/∆T | пропорциональная компонента | Настройка (1 этап) |
Ti | постоянная времени интегрирования | Настройка (3 этап) |
Td | постоянная времени дифференцирования | Настройка (2 этап) |
В основе данной методики лежит анализ переходной характеристики (Рис 1).
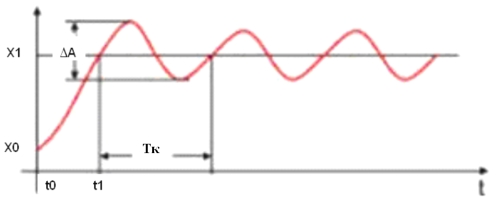
Рис.1
ВНИМАНИЕ!!!
Настройку параметров регулирования следует производить после наладки режимов горения и соотношения топливо/воздух. Указанные операции осуществляют при отключенных регуляторах.
Этап 1. Настройка пропорциональной компоненты ПИД-регулятора
Перед настройкой пропорциональной компоненты регулятора интегральная и дифференциальная компоненты отключаются, либо значение Ti устанавливается максимально возможным, а значение Td - минимально возможным.
Устанавливают первоначальное значение пропорциональной компоненты Kp*Tmeo/ΔT, руководствуясь "Рекомендациями по настройке ПИД-регуляторов в контроллере "АГАВА 6432" или используя заводские настройки контроллера.
Экспериментально снимается (если это допустимо по технологическим условиям) и регистрируется при помощи программы "AGAVA TUNE" характеристика переходного процесса.
Возможные варианты кривых переходной характеристики приведены на рис.2.
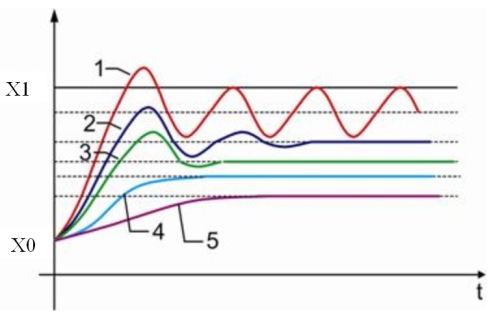
Рис. 2
Переходная характеристика 1
Значение коэффициента пропорциональности очень велико, переходная характеристика (а значит, и настройка регулятора) далека от оптимальной. Коэффициент пропорциональности следует уменьшить. При этом надо иметь в виду, что варьировать пропорциональную компоненту можно двумя переменными: в явном виде, изменяя Kpи подбирая период регулирования ΔT . Исходное значение ΔT рассчитывают по формуле:
ΔT=(0,05/0,1)Tmeo
Переходная характеристика 2
Для этой кривой характерны затухающие колебания (3-5 периодов). Если в дальнейшем предполагается использовать и дифференциальную компоненту ПИД-регулятора, то выбранное значение коэффициента пропорциональности является оптимальным. Для этого случая настройка пропорциональной компоненты считается законченной.
Если дифференциальная компонента использоваться не будет, то рекомендуется еще уменьшить Kp так, чтобы получились переходные характеристики типа 3 или 4.
Переходная характеристика 3
В этой переходной характеристике имеет место небольшой выброс и быстро затухающие колебания (1-2 периода). Этот тип переходной характеристики обеспечивает хорошее быстродействие и быстрый выход на заданную температуру. В большинстве случаев его можно считать оптимальным, если в системе допускаются выбросы при переходе с одной уставки на другую или при резком изменении нагрузок, например, при изменении расхода пара.
Выбросы можно устранить дополнительным уменьшением Kp так, чтобы получилась переходная характеристика типа 4.
Переходная характеристика 4
Регулируемый параметр плавно подходит к установившемуся значению без выбросов и колебаний. Эта тип переходной характеристики также можно считать оптимальным, однако быстродействие регулятора несколько снижено.
Переходная характеристика 5
Сильно затянутый подход к установившемуся значению говорит о том, что коэффициент пропорциональности чрезмерно занижен. Динамическая и статическая точность регулирования здесь мала. Рекомендуется увеличить значение Kp.
Следует обратить внимание на два обстоятельства. Во-первых, во всех рассмотренных выше случаях установившееся значение параметра в системе не совпадает со значением уставки. Чем меньше коэффициент пропорциональности, тем больше остаточное рассогласование.
Во-вторых, чем меньше коэффициент пропорциональности, тем больше длительность переходных процессов.
Однако остаточное рассогласование, характерное для чисто пропорциональных регуляторов (П-регуляторов), минимизируется интегральной компонентой регулятора (ПИ-регулятор).
Выводы:
Во всех рассмотренных выше случаях установившееся значение параметра в системе не совпадает со значением уставки. Чем меньше коэффициент пропорциональности, тем больше остаточное рассогласование.
Чем меньше коэффициент пропорциональности, тем больше длительность переходных процессов.
Остаточное рассогласование, характерное для чисто пропорциональных регуляторов (П-регуляторов), минимизируется интегральной компонентой регулятора (ПИ-регулятор).
Этап 2. Настройка постоянной времени дифференцирования Td
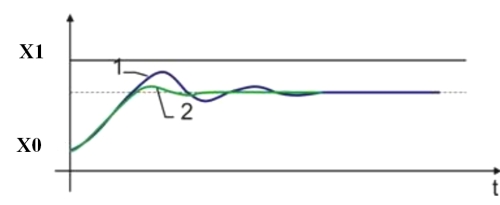
Рис.3
Этот этап присутствует только в том случае, если применяется полнофункциональный ПИД-регулятор. Если дифференциальная компонента применяться не будет (используется ПИ-регулятор), то следует сразу перейти к этапу 3 (Настройка интегральной компоненты Ti).
Устанавливают первоначальное значение постоянной времени Td. При этом можно использовать «Рекомендации по настройке ПИД-регуляторов в контроллере "АГАВА 6432" или применить заводские настройки контроллера.
Предположим, что на этапе 1 установлен коэффициент пропорциональности, соответствующий переходной характеристике типа 1 показанной на рис.3, в которой присутствуют затухающие колебания. В этом случае следует выбрать такое значение постоянной времени дифференцирования, чтобы переходная характеристика имела вид кривой 2 на рис.3. В качестве первого приближения, постоянную времени дифференцирования можно рассчитать по формуле:
Td = 0,2 x Tk,
где Tk - период колебания (Рис.1).
Вывод: Дифференциальная компонента устраняет затухающие колебания и делает переходную характеристику, похожей на тип 2 (см. рис.3). Это значит, что динамическая точность регулирования при наличии дифференциальной компоненты (ПД-регулятор) может быть выше, чем для П-регулятора.
Этап 3. Настройка величины постоянной времени интегрирования Ti
После настройки пропорциональной и, при необходимости и дифференциальной компоненты, получается переходная характеристика 1, показанная на рис 4.
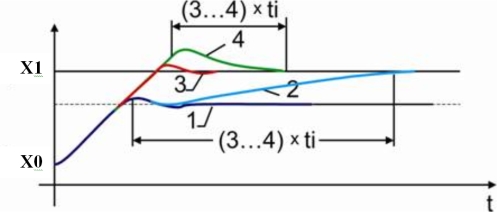
Рис.4
Начальное значение постоянной времени интегрирования следует установить, руководствуясь "Рекомендациями по настройке ПИД-регуляторов в контроллере "АГАВА 6432" или используя заводские настройки контроллера.
Возможные варианты кривых приведены на рис.4.
Переходная характеристика 2
Такая кривая получается при чрезмерно большой величине постоянной времени интегрирования. Выход на уставку оказывается затянутым и длится примерно (3...4) х Ti. В этом случае рекомендуется уменьшить значение постоянной времени интегрирования Ti.
Переходная характеристика 4
Получается при слишком малой величине постоянной времени интегрирования. Выход на уставку также длится (3...4) x Ti. Если постоянную времени интегрирования уменьшить еще, то в системе могут возникнуть колебания. Следует увеличить значение постоянной времени интегрирования Ti.
Переходная характеристика 3
Значение постоянной времени интегрирования Ti выбрано оптимально.
Вывод: Интегральная компонента позволяет минимизировать остаточное рассогласование между установившимся в системе значением регулируемого параметра и уставкой.
При составлении данного "Практического руководства..." были использованы материалы НПФ "КонтрАвт", г. Нижний Новгород, http://www.contravt.ru
20.01.2008