Рекомендации по настройке ПИД-регуляторов в контроллере АГАВА 6432.10
Введение
В контроллере "АГАВА 6432" программно реализована следующая формула ПИД-закона дискретного регулирования:
 (1)
(1)
где
n - номер такта регулирования
ΔTn - длительность импульса управляющего воздействия на n-такте
ΔT - интервал дискретности (период регулирования)
Kp - коэффициент пропорциональности
Tmeo - время хода исполнительного механизма
Ti - постоянная времени интегрирования
Td - постоянная времени дифференцирования
En - сигнал рассогласования на n-такте
Суть предлагаемой методики заключается в том, что параметры объекта непосредственно не определяются, а в скрытой форме оцениваются в процессе самой настройки, когда контур регулирования уже замкнут, но ещё не настроен.
ВНИМАНИЕ!!!
Настройку параметров регулирования следует производить после наладки режимов горения и соотношения топливо/воздух. Указанные операции осуществляют при отключенных регуляторах.
Методика настройки
Определяют значение Tmeo. Для этого при помощи секундомера замеряют время хода исполнительного механизма в зоне регулирования;
Рассчитывают значение интервала дискретности, исходя из соотношения:

В соответствующих пунктах меню настроек контроллера устанавливают рассчитанное и измеренное значения ΔT иTmeo.
Переводят выбранный контур в режим П-регулятора, для чего отключают интегральную и дифференциальную компоненты, либо устанавливают значение Ti максимально возможным, а значение Td - минимально возможным.
Контур регулирования выводят на границу устойчивости. Для этого постепенно увеличивают коэффициент пропорциональности Kp до критического значения (Kp крит), при котором контур войдет в режим колебаний (см. рис. 1).
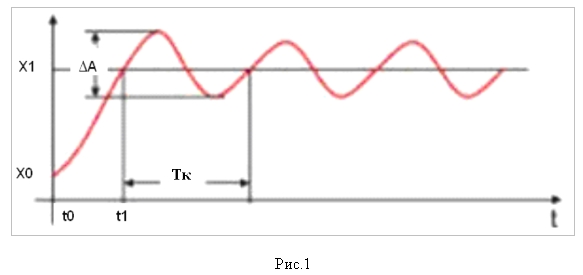
Определяют период колебаний Tк и критическое значение Kp крит. Далее, по приведённым ниже формулам, рассчитывают требуемые значения параметров:
для П-регулятора: Kp = 0,5 Kp крит;
для ПИ-регулятора: Kp = 0,45 Kp крит и Ti = 0,83Tк;
- для ПИД-регулятора: Kp = 0,60 Kp крит , Ti = 0,50Tк и Td = 0,125 Tк.
Замечания, касающиеся выбора значения ΔT:
- Увеличение интервала дискретности ΔT по отношению к Tmeo (2) приводит к росту динамической ошибки. С другой стороны, чрезмерно заниженное абсолютное значение ΔT не позволяет минимизировать величину статической ошибки.
- Если расчетное значение ΔT (п.2) получилось слишком малым необходимо применить более медленный исполнительный механизм, или изменить размеры сопрягающих рычагов.
Авторы рекомендаций:
Проф. Лукас В.А.
г. Берлин, w.a.lukas@web.de
Эрман Г.З.
erman@kb-agava.ru